Sensor
- It is a element or device which is sensitive to Physical variable to be measured and generated quantified output .
- Generally electronic sensors generates output as current or voltage.
- It is used to measure physical quantity such as position ,force, distance, strain, vibration, temperature and acceleration.
- It is a device which generates mechanical output usually linear motion or angular rotation.
- Electrical actuators converts electrical input into mechanical output .
- Example DC motor, AC motor, piezoelectric material, stepper motor, hydraulic and pneumatic actuator.
- It is a device which converts one form of energy into another form of energy .
- Transducer is a step ahead of sensors and actuators.
- It is an electronic device which does computation on the data received from sensors and executes pre defined algoritham and generates output to actuators.
- Processor coordinates both sensors and actuators.
- It consists of electronic sensors and electronic processor and electrical or mechanical actuators.
- In mechatronics system sensors and processor and the actuators coordinate each other to perform specific task.
- It work like an automatic control system
- Example


Sensitivity
- The ratio of output span to input span is called as sensitivity .
- The ratio between change in output to change in input is called a sensitivity.
- Generally the sensitivity of the sensors should be high enough to produce quantified output.
- Example : theremocouple


- Minimum change hind input required to change the output from previous value to next possible value is called as resolution .
- Ideally the magnitude of the resolution should be as low as possible .
- Example
- It consists of many devices. the purpose of the measurement system is to display the physical variable such that it can be easy to understand .
- It is an electronic device which increase the strength of input signal and provides very high output.


- It is an electronic device which converts analog input into digital output usually binary code, consider N bit ADC which converts any analog input into N bit binary code .
- Example

1.Signal conditioning circuit
- It converts the output of the sensors into more appropriate form for further processing.
- Usually signal conditioning circuits consist of amplifier, filter, wheatstone bridge, etc .
- It converts the output of signal conditioning circuit into more appropriate form such that everyone can understand.
- Signal processing circuit ussually consist of ADC, processor, DAC etc.


- To remove the noise from the signal placed between sensor and amplifier .
- It is the ability of an instrument to reproduce the same output value when sensor is used to measure same input repeatedly under same operating conditions.
- It is the closeness of many output readings taken for same input quantity without changing operating conditions.
- Ideally sensor should be highly precised.
- Ideally the output of the sensor should be linearly associated with the input of the sensor irrespective of operating conditions.
- The difference between true value ,measured value is called as non linear error .
- Non linear error at every operating input may not be same.


- Degree of closeness between measured value and true value is defined as as accuracy.
- The percentage of accuracy will be always expressed in percentage of error.
Basics of electricity
- Flow of charge through a conductor par unit time is called as current.
Consider and electric circuit shown below

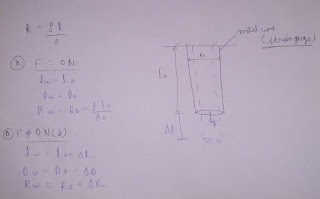
Strain gauge
- It is a registry based strain sensor which is used to measure force ,acceleration and torque .
- Strain gauge is a elastic material which is made up of metal as well as semiconductor .
- Strain gauge not only measures the force it is also capable to measure the variables associated with the force like torque and acceleration.
- The sensitivity of the strain gauge is very low because of very high young modules.
- Consider the metal wire shown below



- It consists of four resistors which are connected as shown in the figure
- Weight stone bridge converts change in resistance into voltage
- The amount of output voltage depends on the value of 4 resistors and supply voltage .




- It is resistive based position sensor .
- It is also called as proximity sensor and used to measure linear displacement and angular displacement .
- It is also called as electro mechanical device it converts mechanical input into electrical output.
- Potentiometer consists of thin metal film which has distributed resistance throughout its length viper which slides on metal film as shown in the figure .
- For any input displacement wiper breaks the metal film into two segments and usually voltage will be connected across the lower segment.


- We can measure angular displacement by using thin metal film which was bent like arc shape as shown in the figure below.
- At different angle or positions viper break the thin metal film into two segments and the voltage will be measured across the lower segment of metal film.
- Potentiometer can be used as potential divider .




Stepper motor
- It is an electrical actuator which converts electrical input into mechanical output.
- Stepper motor is DC motor which is also called as electro mechanical device.
- It converts pulsed electrical energy into stepwise discrete angular rotation.
- It works on predefined switching sequence .


- Stepper motor consists of a cylindrical stator core which has stator places as shown in figure.
- Each stator pole has a copper winding if the copper winding is activated with the current then stator winding behaves like electro magnet.
- Stepper motor also consists of cylindrical rotor which has rectangular rotor teeth.
- If the stator winding is activated with the DC current then rotor rotates such that the teeth of the rotor exactly aligns to the axis of stator pole .
4 phase 4/2 stepper motor


Switching sequence

Stator pitch
- The angular separation between two successive falls on the stator is called as stator pitch .


- The angular separation between two successive teeth on the rotor is called as rotor pitch.


- The angular rotation of the rotor when only one phase is activated at a time is called as full step angle .


- The angular rotation of the rotor when two successive phases are activated at a time is called as half step angle .



Note :
- Number of pulses apply to the stepper motor in one second is called as input pulse rate for input pulse frequency.
- Shaft speed is directly proportional to input pulse frequency.
- Total angular rotation depends on number of pulses.

Question: in the feed drive of a point to point open loop CNC drive stepper motor rotating at constant speed drives the table through a gear box and screw nut mechanism pitch 5mm and gear ratio 1/5, if the stepper motor is driven by a pulse generator of frequency 10,000 pulses per minute the constant of the stepper motor is 200 steps per Revolution then the table moment corresponding to one pulse of the pulse generator is -------

- Stepper motor not only provides the angular displacement,it is also using to provide linear displacement .
- To get highly precised motion the step angle of the stepper motor should be as low as possible .


Torque vs speed characteristics

Question : the rotational speed of a given stepper motor depends on
Answer: step pulse frequency







{kind=link}
0 Comments